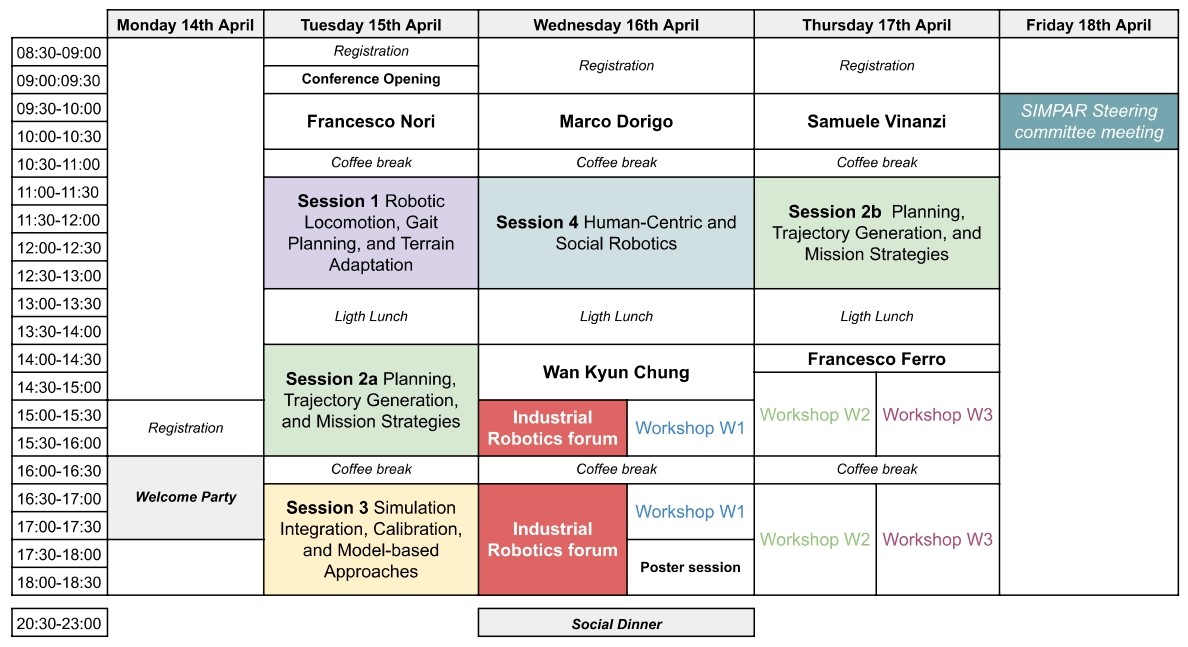
Keynote Talks
15th April 2025
 09:00-10:30
09:00-10:30
Francesco Nori
Director of Robotics at Google DeepMind, UK
16th April 2025

09:00-10:30
Marco Dorigo Université Libre de Bruxelles, Belgium

14:00-15:00
Wan Kyun Chung, IEEE Fellow
POSTECH, Korea
17th April 2025

09:00-10:30
Samuele Vinanzi
Sheffield Hallam University, UK

Session 1 – Robotic Locomotion, Gait Planning, and Terrain Adaptation
15th April 2025, 11:00-13:00
Paper ID |
Paper Title | Author Names |
| 8 | A Passive Recursive Newton Euler Algorithm and Its Application to Inverse Dynamics under Passivity-based Controller | Jonghyeok Kim (POSTECH); Youngjin Choi (Hanyang University); Jonghoon Park (Neuromeka Co., Ltd.); Wan Kyun Chung (POSTECH, Korea) |
| 17 | Deep reinforcement learning of robotic manipulation for whip targeting | Xiang Bai, Junyi Wang (Technical University of Denmark); Xiaofeng Xiong (University of Southern Denmark); Evangelos Boukas (Technical University of Denmark) |
| 18 | Environment-Adaptive Gait Planning through Reinforcement Learning for Lower-Limb Exoskeletons | Edoardo Trombin, Francesco Crisci, Luca Tonin, Emanuele Menegatti, Stefano Tortora (University of Padova) |
| 21 | TERA: A Simulation Environment for Terrain Excavation Robot Autonomy | Christo Aluckal (University at Buffalo); Karthik Dantu (SUNY Buffalo) |
| 31 | Acquisition and Evaluation of Walking and Wheel Movement for a Transformable Quadruped Wheelchair Using Reinforcement Learning | Atsuki Akamisaka, Katashi Nagao (Nagoya University) |
| 35 | Enhancing Agricultural Sustainability Through Robotic-IoT Systems for Real-Time Monitoring Soil Contamination | Najla M. Alharbi, Aljuhara Alshagri (King Abdulaziz City for science and technology) |
Session 2a – Planning, Trajectory Generation, and Mission Strategies
15th April 2025, 14:00-16:00
| 1 | Autonomous drilling and deburring processing planning method of multi-robot systems | Tianyi Zhang (Dalian University of Technology)* |
| 4 | Comparative Analysis of Local Trajectory Planning Algorithms in ROS2 | Asan Adamanov, Seifalla Mohamed Elbouhy, Philipp Maximilian Braun, Hendrik Wilhelm Rose (Hamburg University of Technology) |
| 10 | Augmented Costmap-Based Path Planning and Control for Multi-Mobile Robot Rigid Formation | Stefano Mutti (SUPSI-DTI); Roberto Fausti (STIIMA-CNR); Nicola Pedrocchi (STIIMA-CNR); Anna Valente (SUPSI) |
| 11 | Efficient Greedy Unsupervised Learning of Multivariate Mixture Models with Moment-Based Splitting | Nicola Greggio, Alexandre Bernardino (Instituto Superior Tecnico) |
| 15 | Deep Reinforcement Learning for Next Best View Planning in Autonomous Robot-Based 3D Reconstruction | Hossein Omid Beiki (Laboratory for Machine Tools and Production Engineering WZL of RWTH Aachen University)*; Bijan Kavousian (Werkzeugmaschinenlabor WZL der RWTH Aachen); Manuel Belke (Laboratory for Machine Tools and Production Engineering WZL of RWTH Aachen University); Oliver Petrovic (Laboratory for Machine Tools and Production Engineering WZL of RWTH Aachen University); Christian Brecher (Rheinisch-Westflische Technische Hochschule Aachen) |
| 24 | Bio-Inspired Home Localization Using Event-Based Vision and Spiking Neural Networks in Simulated Environment |
Rizwana Kausar, Fakhreddine Zayer, |
Session 3 – Simulation Integration, Calibration, and Model-based Approaches
15th April 2025, 16:30-18:30
| 2 | An interactive approach to extrinsically calibrate 3D LiDAR and monocular camera using open source toolchain | Abdul Haq Azeem Paracha, Christoph Brückner, Lucila Patino Studencki, Georg Arbeiter (Hochschule Coburg) |
| 6 | Reducing the Sim2Real gap for vacuum grasping in Isaac Sim | Isabella Soraruf, Marco Todescato, Dominik Matt, Andrea Giusti (Fraunhofer Italia) |
| 7 | MuJoCo ROS: Integrating ROS with the MuJoCo Engine for Accurate and Scalable Robotic Simulation | David Leins, Robert Haschke, Helge Ritter (Bielefeld University) |
| 12 | Model-based Verification and Monitoring for Safe and Responsive Robots | Stefano Bernagozzi, Sofia Faraci (Italian Institute of Technology); Enrico Ghiorzi, Karim Pedemonte ((University of Genoa); ); Angelo Ferrando (University of Modena and Reggio Emilia); Lorenzo Natale (Italian Institute of Technology); Armando Tacchella (University of Genoa) |
| 20 | Trajectory Prediction in Upper-Limb Robotic Rehabilitation and its Applicability to Post-Stroke Patients: A Preliminary Analysis | Adriano Scibilia, Nicola Pedrocchi, Marco Caimmi (CNR-STIIMA) |
| 30 | An Open-sourced Digital Twin Model of an Industrial Dryer | Dominik Pastuszka Malek, Xiaofeng Xiong (University of Southern Denmark) |
| 42 | Intelligent Inspection with Autonomous Robots: Challenges, Advances and Future Research | Erfu Yang (University of Strathclyde) |
Session 4 – Human-Centric and Social Robotics
16th April 2025, 11:00-13:00
| 3 | Robot to Human Interaction with multi-modal conversational engagement | Giuseppe De Simone, Luca Greco, Alessia Saggese, Mario Vento (University of Salerno, Italy) |
| 5 | Image Data Augmentation through Generative Adversarial Networks for Waste Sorting | Alberto Bacchin, Fabio Marangoni (University of Padova); Alberto Gottardi (IT+Robotics srl, University of Padova)*; Emanuele Menegatti (University of Padova) |
| 13 | A.I. at the Edge of the Edge: Intelligent Sensor Falling Detection for Humanoid Robot | Giuseppe Messina (STMicroelectronics )*; Yuri Filistad, Corrado Santoro (University of Catania) |
| 14 | Projecting Dancing Movements From Human Onto Robot Arm by Weighted Multipoint Mapping | Giuseppe Saviano (University of Pisa); Alberto Villani (University of Siena)*; Domenico Prattichizzo (University of Siena) |
| 34 | Practical Reasoning with Attention Mechanisms | Massimo Cossentino, Giovanni Pilato, Guido Averna (CNR – National Research Council of Italy, ICAR); Myrto Mylopoulos (Carleton University); John Mylopoulos (University of Toronto) |
| 37 | Towards Trustworthy and Explainable Socially Assistive Robots: A Cognitive Architecture for Dietary Guidance | Luigi D’Arco, Luca Raggioli (University of Naples Federico II); Gianni Randazzo (University of Palermo); Giovanni De Gasperis (University of L’Aquila); Antonio Chella (University of Palermo); Stefania Costantini (University of L’Aquila); Silvia Rossi (University of Naples Federico II) |
Session 2b – Planning, Trajectory Generation, and Mission Strategies
17th April 2025, 11:00-13:00
| 16 | Real-time Underwater Place Recognition in Synthetic and Real Environments using Multibeam Sonar and Learning-based Descriptors | Daniel Fusaro, Simone Mosco, Wanmeng Li, Alberto Pretto (University of Padova) |
| 23 | Processing Continuous-Valued Signals for Multimodal Spike-Based Pose Regression | Vidya Sudevan, Fakhreddine Zayer, Rizwana Kausar, Sajid Javed, Hamad Karki (Khalifa University); Giulia De Masi (Sorbonne University); Jorge Dias (Khalifa University) |
| 27 | Maritime Mission Planning for Unmanned Surface Vessel using Large Language Model | Muhayy Ud Din, Waseem Akram, Ahsan B Bakht, Yihao Dong, Irfan Hussain (Khalifa University UAE) |
| 28 | DANCERS: A Physics and Network Co-Simulator for Communicating Multi-Robot Systems | Theotime Balaguer, Olivier Simonin (INSA Lyon); Isabelle Guérin Lassous (Université Claude Bernard Lyon 1); Isabelle Fantoni (Nantes Université) |
| 36 | Boosting Behavior Tree Generation for Robots with Large Language Models and Genetic Programming | Aaron Verdaguer-Gonzalez (Eurecat)*; Nestor Garcia (Eurecat); Magi Dalmau-Moreno (Eurecat); Luis Merino (Unicersidad Pablo de Olavide) |
| 40 | The Foundation for Developing an Exoskeleton for the Rehabilitation of Temporomandibular Disorders | Paul-Otto Müller, Oskar von Stryk (Technical University of Darmstadt) |
| 41 | Future-Proof Adaptive Path Correction in Automated Fibre Placement: A Concept Demonstration | Stig McArthur (University of Strathclyde)*; Carmelo Mineo (CNR – National Research Council of Italy, ICAR); Alastair Poole, Iain Bomphray Jörn Mehnen (University of Strathclyde) |
Workshops and Forum links
[W1] Theory of Mind and Emotions in Human-Robot Interaction.
[W2] How do people explain the behaviour of robots? Epistemology of XAI and social robotics
[W3] Artificial Intelligence and its legal challenges. The European Union AI Act.
Social event
16th April 2025, 20:30-23:00
Restaurant CITYSEA